Loading...
Searching...
No Matches
rtabmap.hpp File Reference
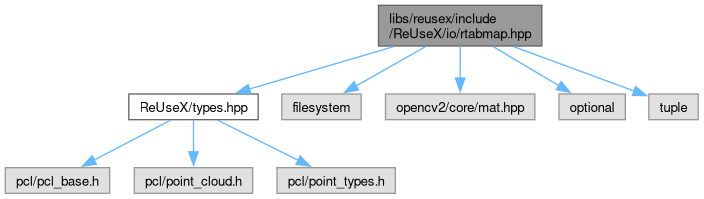
#include <ReUseX/types.hpp>#include <filesystem>#include <opencv2/core/mat.hpp>#include <optional>#include <tuple>
Include dependency graph for rtabmap.hpp:
Go to the source code of this file.
Namespaces | |
| namespace | ReUseX |
| namespace | ReUseX::io |
Functions | |
| auto | ReUseX::io::import_rtabmap_database (const std::filesystem::path &database_path, float resolution, float min_distance, float max_distance, float sampling_factor) -> std::tuple< CloudPtr, CloudNPtr, CloudLPtr > |
| bool | ReUseX::io::checkRTABMapDatabase (std::filesystem::path const &dbPath) |
| bool | ReUseX::io::initRTABMapDatabase (std::filesystem::path const &dbPath) |
| bool | ReUseX::io::writeLabelsToRTABMapDatabase (std::filesystem::path const &dbPath, cv::Mat const &labels, std::optional< size_t > id=std::nullopt) |
| cv::Mat | ReUseX::io::readLabelsFromRTABMapDatabase (std::filesystem::path const &dbPath, size_t id) |