Loading...
Searching...
No Matches
reusex.hpp File Reference
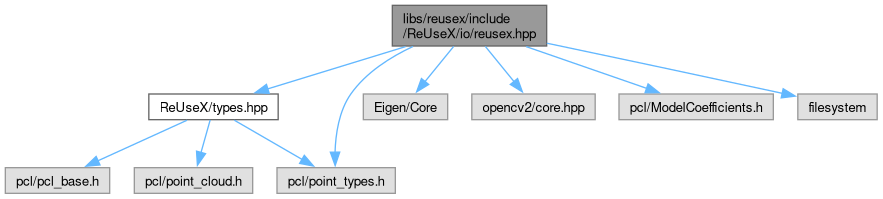
#include "reusex/types.hpp"#include <Eigen/Core>#include <opencv2/core.hpp>#include <pcl/ModelCoefficients.h>#include <pcl/point_types.h>#include <filesystem>
Include dependency graph for reusex.hpp:
Go to the source code of this file.
Namespaces | |
| namespace | reusex |
| namespace | reusex::io |
Functions | |
| auto | reusex::io::getPlanes (CloudLConstPtr planes, CloudNConstPtr normals, CloudLocConstPtr locations) -> std::tuple< EigenVectorContainer< double, 4 >, EigenVectorContainer< double, 3 >, std::vector< IndicesPtr > > |
| Extract plane data from labeled point clouds. | |
| bool | reusex::io::save (std::filesystem::path const &output_path, std::vector< pcl::ModelCoefficients > const &model_coefficients, std::vector< Eigen::Vector4f, Eigen::aligned_allocator< Eigen::Vector4f > > const ¢roids, std::vector< std::shared_ptr< pcl::Indices > > const &inlier_indices) |
| Save plane data to file. | |
| bool | reusex::io::read (std::filesystem::path const &input_path, std::vector< pcl::ModelCoefficients > &model_coefficients, std::vector< Eigen::Vector4f, Eigen::aligned_allocator< Eigen::Vector4f > > ¢roids, std::vector< std::shared_ptr< pcl::Indices > > &inlier_indices) |
| Read plane data from file. | |