Loading...
Searching...
No Matches
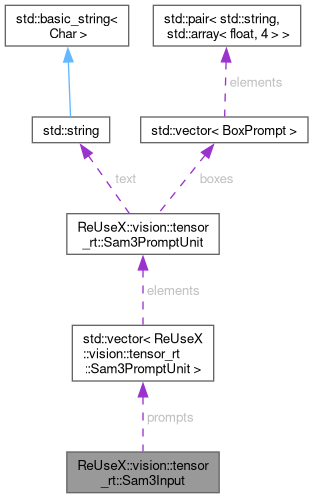
ReUseX::vision::tensor_rt::Sam3Input Struct Reference
#include <Sam3Type.hpp>
Collaboration diagram for ReUseX::vision::tensor_rt::Sam3Input:
Public Member Functions | |
| Sam3Input ()=default | |
| Sam3Input (const cv::Mat &img) | |
| Sam3Input (const cv::Mat &img, const std::vector< Sam3PromptUnit > &p, float conf) | |
Public Attributes | |
| float | confidence_threshold |
| cv::Mat | image |
| std::vector< Sam3PromptUnit > | prompts |
Detailed Description
Definition at line 23 of file Sam3Type.hpp.
Constructor & Destructor Documentation
◆ Sam3Input() [1/3]
|
default |
◆ Sam3Input() [2/3]
|
inline |
Definition at line 29 of file Sam3Type.hpp.
References image.
◆ Sam3Input() [3/3]
|
inline |
Definition at line 30 of file Sam3Type.hpp.
References confidence_threshold, image, and prompts.
Member Data Documentation
◆ confidence_threshold
| float ReUseX::vision::tensor_rt::Sam3Input::confidence_threshold |
Definition at line 24 of file Sam3Type.hpp.
Referenced by Sam3Input().
◆ image
| cv::Mat ReUseX::vision::tensor_rt::Sam3Input::image |
Definition at line 25 of file Sam3Type.hpp.
Referenced by Sam3Input(), and Sam3Input().
◆ prompts
| std::vector<Sam3PromptUnit> ReUseX::vision::tensor_rt::Sam3Input::prompts |
Definition at line 27 of file Sam3Type.hpp.
Referenced by Sam3Input().
The documentation for this struct was generated from the following file:
- libs/reusex/include/ReUseX/vision/tensor_rt/Sam3Type.hpp