Loading...
Searching...
No Matches
global-params.hpp File Reference
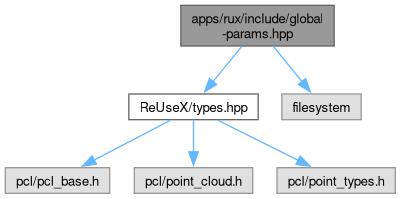
#include <reusex/types.hpp>#include <filesystem>
Include dependency graph for global-params.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | RuxOptions |
Typedefs | |
| using | PointT = reusex::PointT |
| using | NormalT = reusex::NormalT |
| using | LabelT = reusex::LabelT |
| using | Indices = reusex::Indices |
| using | IndicesPtr = reusex::IndicesPtr |
| using | IndicesConstPtr = reusex::IndicesConstPtr |
| using | Cloud = reusex::Cloud |
| using | CloudPtr = reusex::CloudPtr |
| using | CloudConstPtr = reusex::CloudConstPtr |
| using | CloudN = reusex::CloudN |
| using | CloudNPtr = reusex::CloudNPtr |
| using | CloudNConstPtr = reusex::CloudNConstPtr |
| using | CloudL = reusex::CloudL |
| using | CloudLPtr = reusex::CloudLPtr |
| using | CloudLConstPtr = reusex::CloudLConstPtr |
| using | CloudLoc = pcl::PointCloud<LocT> |
Enumerations | |
| enum | RuxError { SUCCESS = 0 , GENERIC = -1 , IO = -2 , INVALID_ARGUMENT = -3 , NOT_IMPLEMENTED = -4 } |
Typedef Documentation
◆ Cloud
| using Cloud = reusex::Cloud |
Definition at line 19 of file global-params.hpp.
◆ CloudConstPtr
| using CloudConstPtr = reusex::CloudConstPtr |
Definition at line 21 of file global-params.hpp.
◆ CloudL
| using CloudL = reusex::CloudL |
Definition at line 27 of file global-params.hpp.
◆ CloudLConstPtr
| using CloudLConstPtr = reusex::CloudLConstPtr |
Definition at line 29 of file global-params.hpp.
◆ CloudLoc
| using CloudLoc = pcl::PointCloud<LocT> |
Definition at line 31 of file global-params.hpp.
◆ CloudLPtr
| using CloudLPtr = reusex::CloudLPtr |
Definition at line 28 of file global-params.hpp.
◆ CloudN
| using CloudN = reusex::CloudN |
Definition at line 23 of file global-params.hpp.
◆ CloudNConstPtr
| using CloudNConstPtr = reusex::CloudNConstPtr |
Definition at line 25 of file global-params.hpp.
◆ CloudNPtr
| using CloudNPtr = reusex::CloudNPtr |
Definition at line 24 of file global-params.hpp.
◆ CloudPtr
| using CloudPtr = reusex::CloudPtr |
Definition at line 20 of file global-params.hpp.
◆ Indices
| using Indices = reusex::Indices |
Definition at line 15 of file global-params.hpp.
◆ IndicesConstPtr
Definition at line 17 of file global-params.hpp.
◆ IndicesPtr
| using IndicesPtr = reusex::IndicesPtr |
Definition at line 16 of file global-params.hpp.
◆ LabelT
| using LabelT = reusex::LabelT |
Definition at line 12 of file global-params.hpp.
◆ NormalT
| using NormalT = reusex::NormalT |
Definition at line 11 of file global-params.hpp.
◆ PointT
| using PointT = reusex::PointT |
Definition at line 10 of file global-params.hpp.
Enumeration Type Documentation
◆ RuxError
| enum RuxError |
| Enumerator | |
|---|---|
| SUCCESS | |
| GENERIC | |
| IO | |
| INVALID_ARGUMENT | |
| NOT_IMPLEMENTED | |
Definition at line 35 of file global-params.hpp.